

工业机器人焊接工作站有什么工作原理?有什么特点?随着焊接作业自动化和智能化水平的推进,工业机器人焊接工作站被广泛用来自动化焊接操作,帮助提高生产效率的同时稳定产品质量,工业机器人焊接工作站多用于批量工件的生产工作中。
 工业机器人焊接工作站的工作原理
工业机器人焊接工作站的工作原理
工业机器人焊接工作站的工作原理:
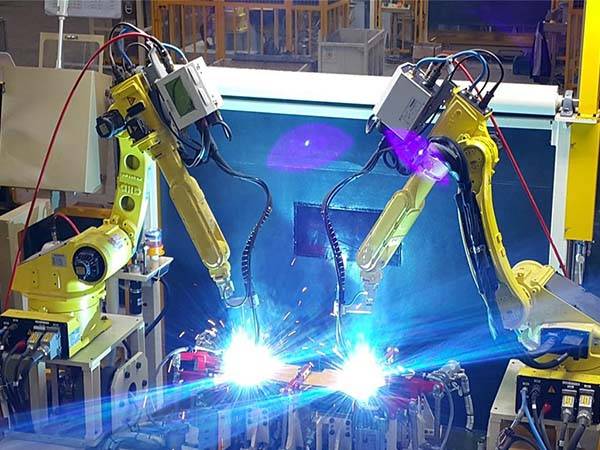
工业机器人焊接工作站正常运行的中枢是其控制柜中的计算机系统。焊接机器人工作站通过计算机系统对焊接环境、焊缝跟踪及焊接动态过程进行智能传感,根据传感信息对各种复杂的空间曲线焊缝进行实时跟踪控制,从而控制焊枪能够实现规划轨迹运行,并对焊接动态过程进行实时智能控制。
其中焊接机器人采用六轴关节型设计,具备六个关节自由度,在工作中主要依靠智能控制系统实现统一规划,点焊机器人通常采用示教再现的工作原理,操作人员通过引导点焊机械臂,一步步按实际任务操作一遍,机器人在导引过程中自动记忆示教的每个动作的位置、姿态、运动参数、焊接参数等,并自动生成一个连续执行全部操作的程序。
 工业机器人焊接工作站的工作原理
工业机器人焊接工作站的工作原理
工业机器人焊接工作站的特点:
1、工业机器人焊接工作站的特点在于人工装卸工件的时间小于机器人焊接的工作时间,可以充分地利用机器人,生产效率高;
2、工业机器人焊接工作站选用带有安全防碰撞装瓷的标准机器人用焊枪,且操作者远离机器人工作空间,安全性好。
3、采用转台交换工件,整个焊接机器人工作站占用面积相对较小,整体布局也利于工件的物流作业。
4、由于安装了不同的末端执行器可以完成不同的作业,用于不同的生产作业多数情况需专门设计,它与机器人的机型、整体布局、工作顺序都有着直接关系。
 工业机器人焊接工作站的工作原理
工业机器人焊接工作站的工作原理
以上就是工业机器人焊接工作站的工作原理及特点,工业机器人焊接工作站自动化和智能化水平较高,能够稳定焊接质量的同时提升生产效益,帮助用户控制成本支出,其应用范围越来越广,逐渐代替了传统焊接。




